Yuhui Chen - 陈宇辉
Affiliations. Institute of Automation, Chinese Academy of Sciences.

at Wall Street, New York in 2024.
Hi there! I am Yuhui Chen, a third-year Ph.D. student in Control Theory and Engineering at the Institute of Automation, Chinese Academy of Sciences (CASIA), advised by Prof. Dongbin Zhao and Prof. Haoran Li.
My research interests lie in Embodied AI, Reinforcement Learning, and Foundation Models, with a focus on building robotic systems that can adapt continuously and interact with the physical world effectively.
Currently, my research focuses on:
- VLA & Foundation Models: Unified architectures for robotic manipulation with spatial perception and 3D reasoning.
- Reinforcement Fine-Tuning & Continual Learning: Reinforcement-based post-training and continual robot learning without catastrophic forgetting.
- Generative World Models as Simulators: Diffusion and video generation models for sample-efficient robot learning.
Before joining CASIA, I worked as an MCU embedded engineer at Dajiang Innovations (DJI). I received B.Eng. degrees from Beijing Institute of Technology (BIT) and the Australian National University (ANU).
News
| Apr 27, 2026 | Our paper about on-policy reinforced fine-tuning VLAs for continual learning (LifeLong-RFT) was accepted to RSS 2026. |
|---|---|
| Feb 02, 2026 | Our paper about learning 3D representations for robotic manipulation (CLAR) was accepted to ICRA 2026. |
| Dec 19, 2025 | Our paper about augmenting VLA models with auxiliary depth prediction (QDepth-VLA) was accepted to AAMAS 2026. |
Latest Posts
Selected Publications
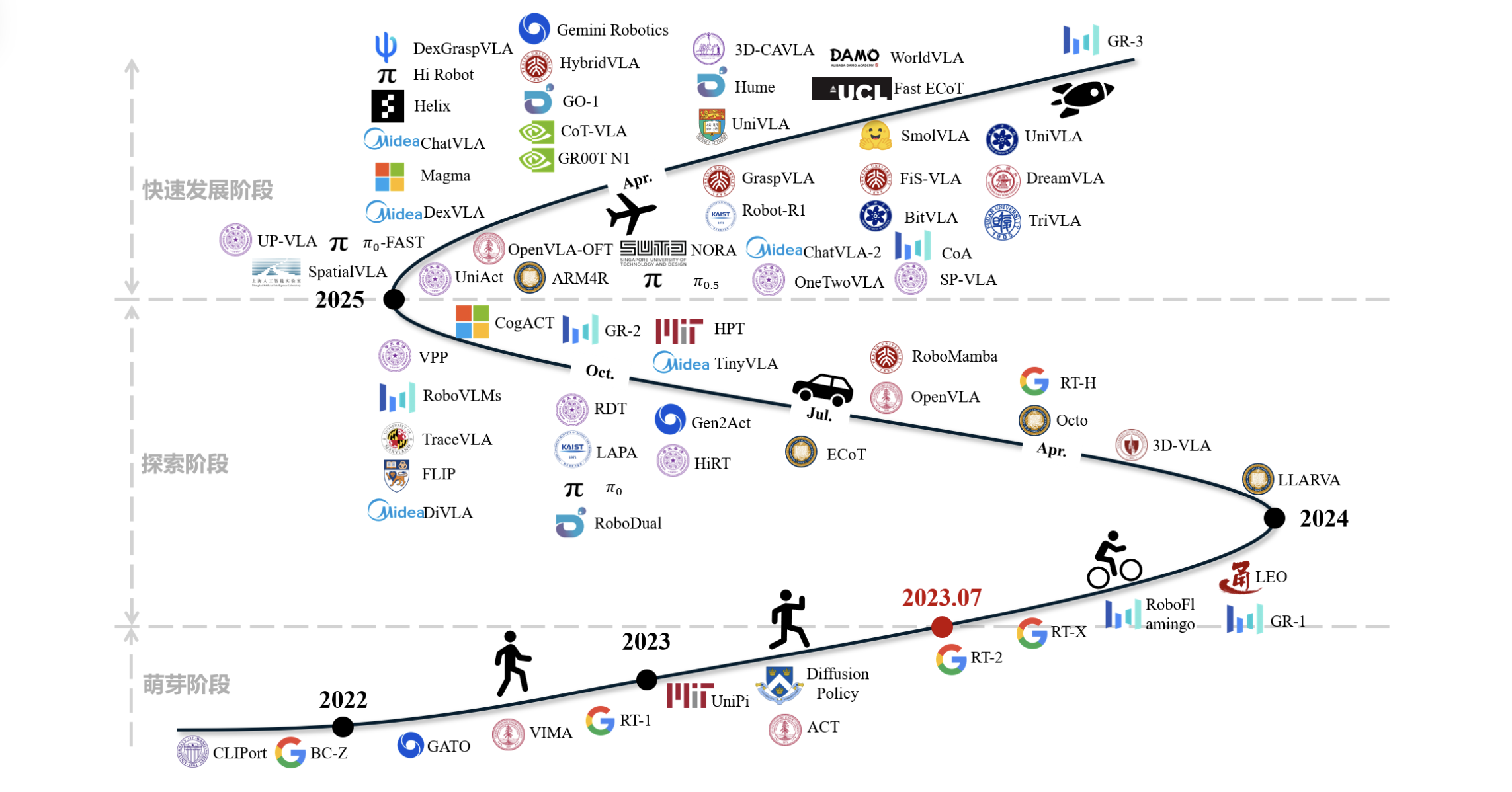
- Survey of Vision-Language-Action Models for Embodied Manipulation面向具身操作的视觉-语言-动作模型综述IEEE/CAA Journal of Automatica Sinica 自动化学报, Jan 2026
- Under Review
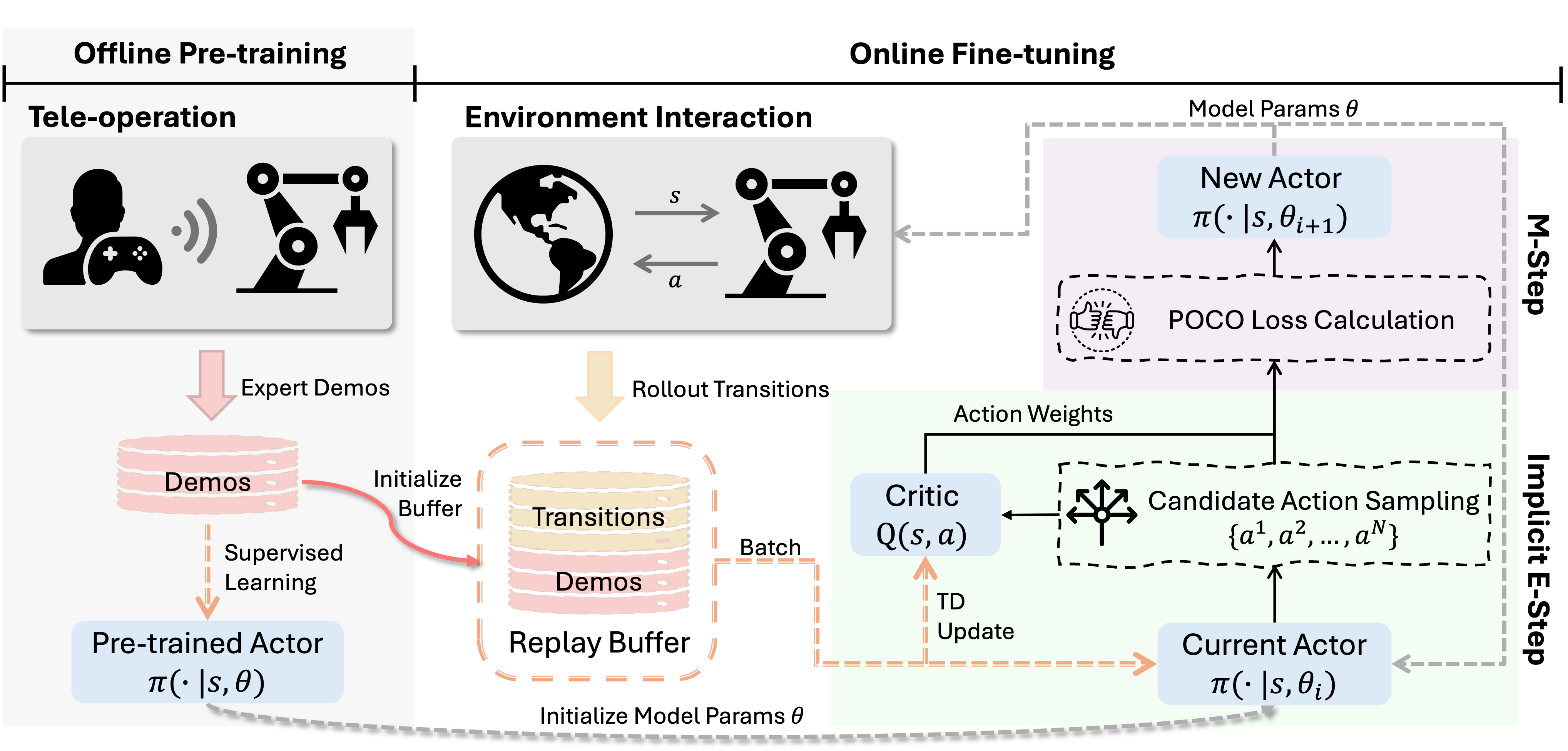 Posterior Optimization with Clipped Objective for Bridging Efficiency and Stability in Generative Policy LearningApr 2026
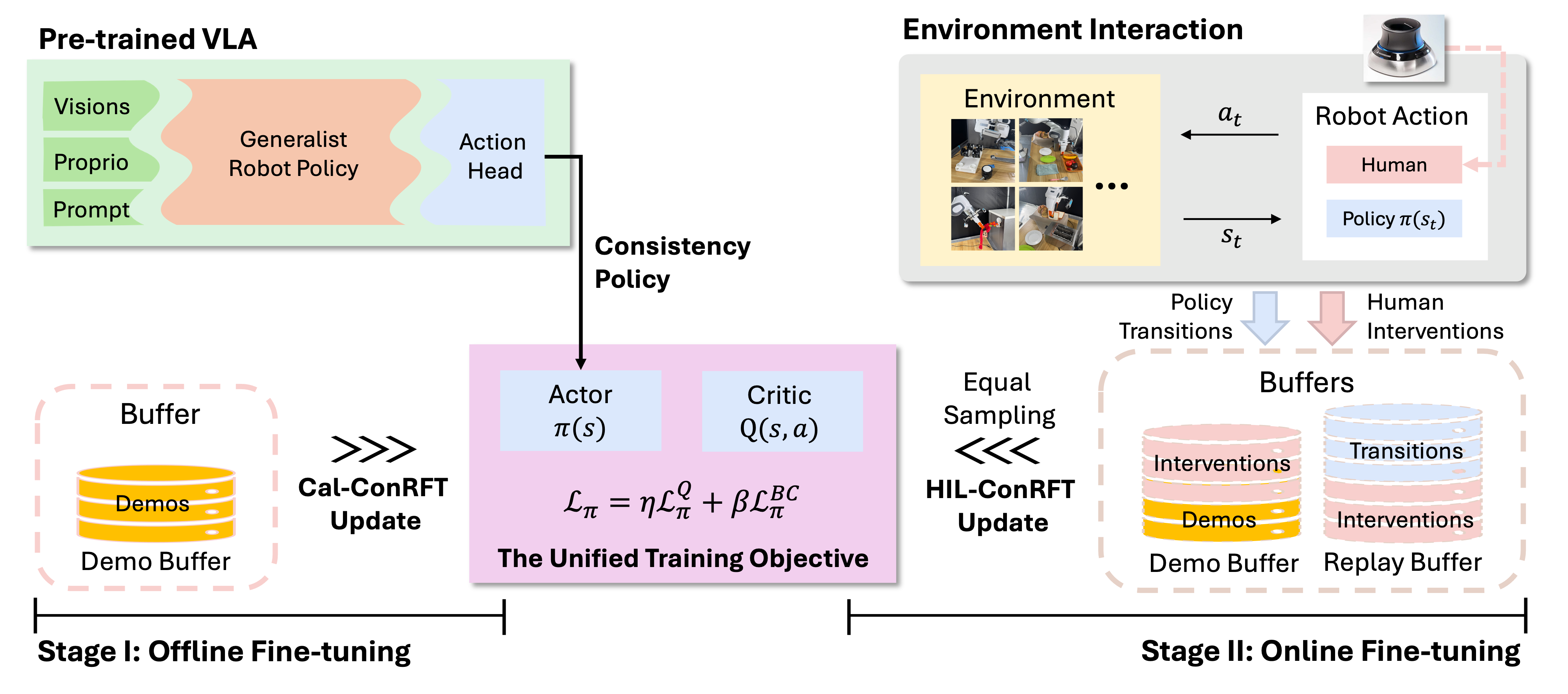
Posterior Optimization with Clipped Objective for Bridging Efficiency and Stability in Generative Policy LearningApr 2026 - ConRFT: A Reinforced Fine-tuning Method for VLA Models via Consistency PolicyIn Robotics: Science and Systems XXI, RSS, Jun 2025
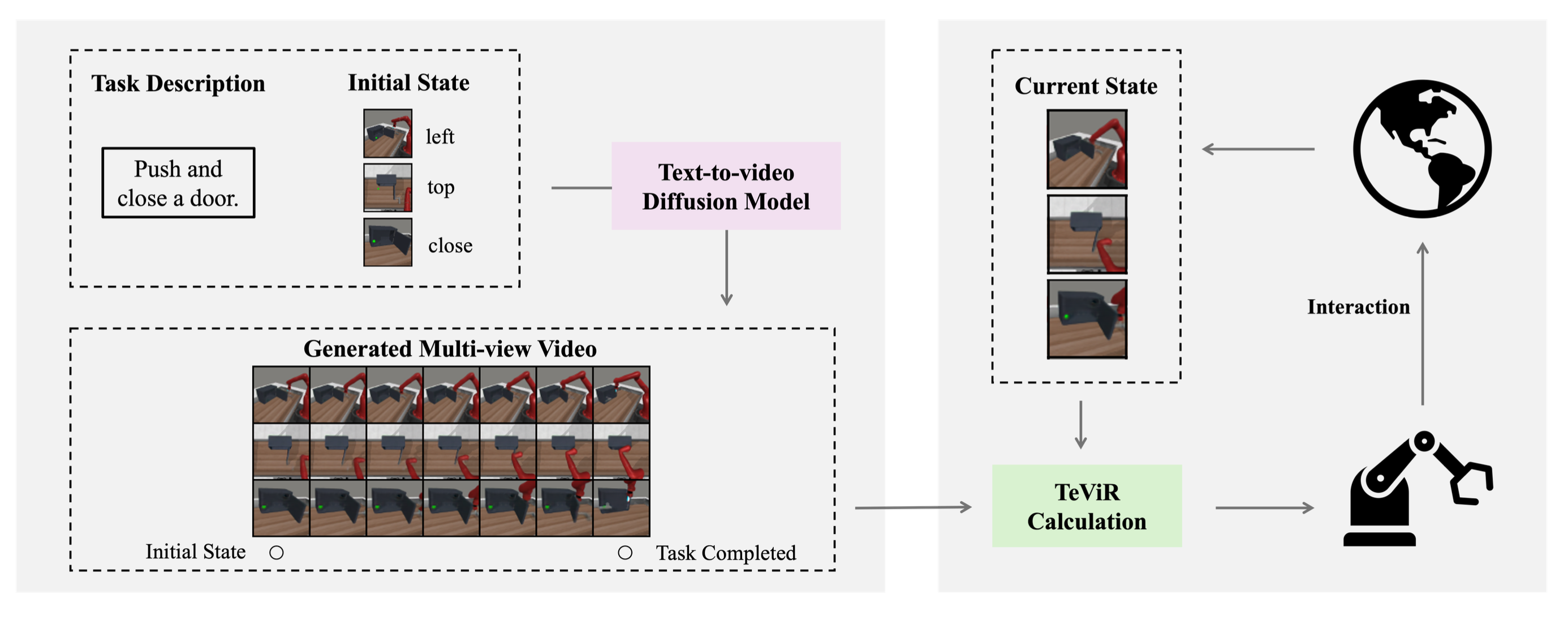
- TeViR: Text-to-Video Reward with Diffusion Models for Efficient Reinforcement LearningIEEE Transactions on Systems, Man, and Cybernetics: Systems, Feb 2026
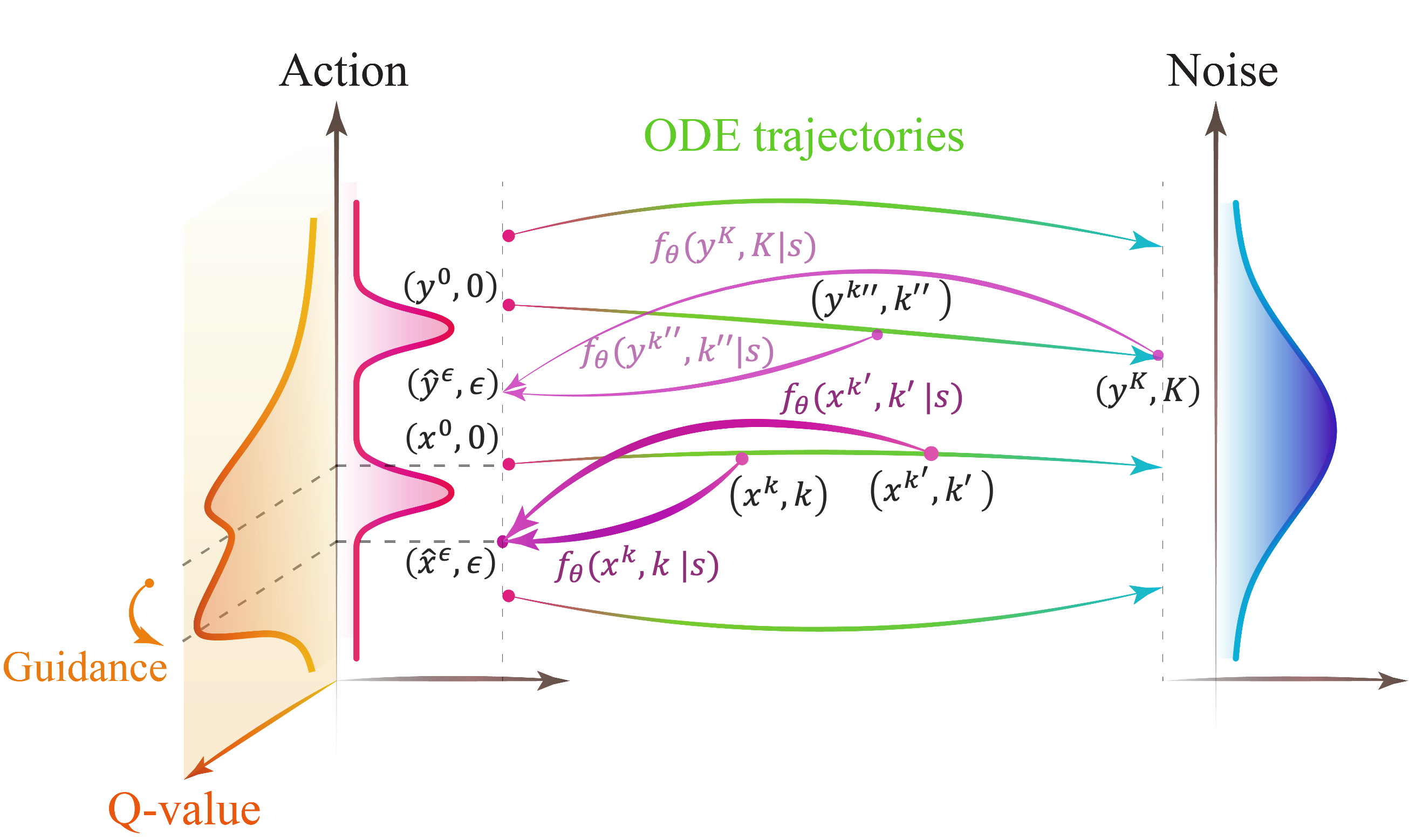
- Boosting Continuous Control with Consistency PolicyIn The 23rd International Conference on Autonomous Agents and Multiagent Systems, AAMAS, May 2024